Хэдлайнер курса
Разработка авторских роботов
Дипломы и сертификаты
Квалифицированные преподаватели-практики
Интерактивная среда
Авторский робот
Что такое манипулятор?
Это устройство для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом. Манипулятор имеет кинематическую цепь, образованную последовательным или последовательно-параллельным соединением тел, называемых кинематическими звеньями, и предназначенную для преобразования движения этих звеньев в требуемое (заданное) движение рабочего органа или схвата. При этом кинематические звенья соединяются друг с другом подвижно с помощью кинематических пар.
Для кого курс
Курс для детей (12+) и взрослых, которые мечтают познакомиться с миром инженерных наук и высоких технологий. Теперь техническому творчеству можно научиться через игру и проектную работу в компании единомышленников. Курс предоставит возможность свободно пользоваться полученными знаниями, чтобы уже сейчас реализовать первые самостоятельные проекты.
Взрослым и детям
курс идеален для расширения кругозора и овладения новыми навыками. Учебный процесс построен таким образом, что вы самостоятельно определяете задачи и сложность.
Студентам профильных учебных заведений
курс подойдет для тех, кому интересна сфера робототехники на практике. Это уникальная возможность учиться в специально созданной среде под руководством профессионалов.

Школьникам
курс идеален для профориентации. Он даст исчерпывающую информацию о профессии и предоставит возможность попробовать свои силы в робототехнике.

Сервисным инженерам
курс подойдет для начинающих специалистов, которые занимаются техническим обслуживанием и ремонтом робототехники.

Основные направления
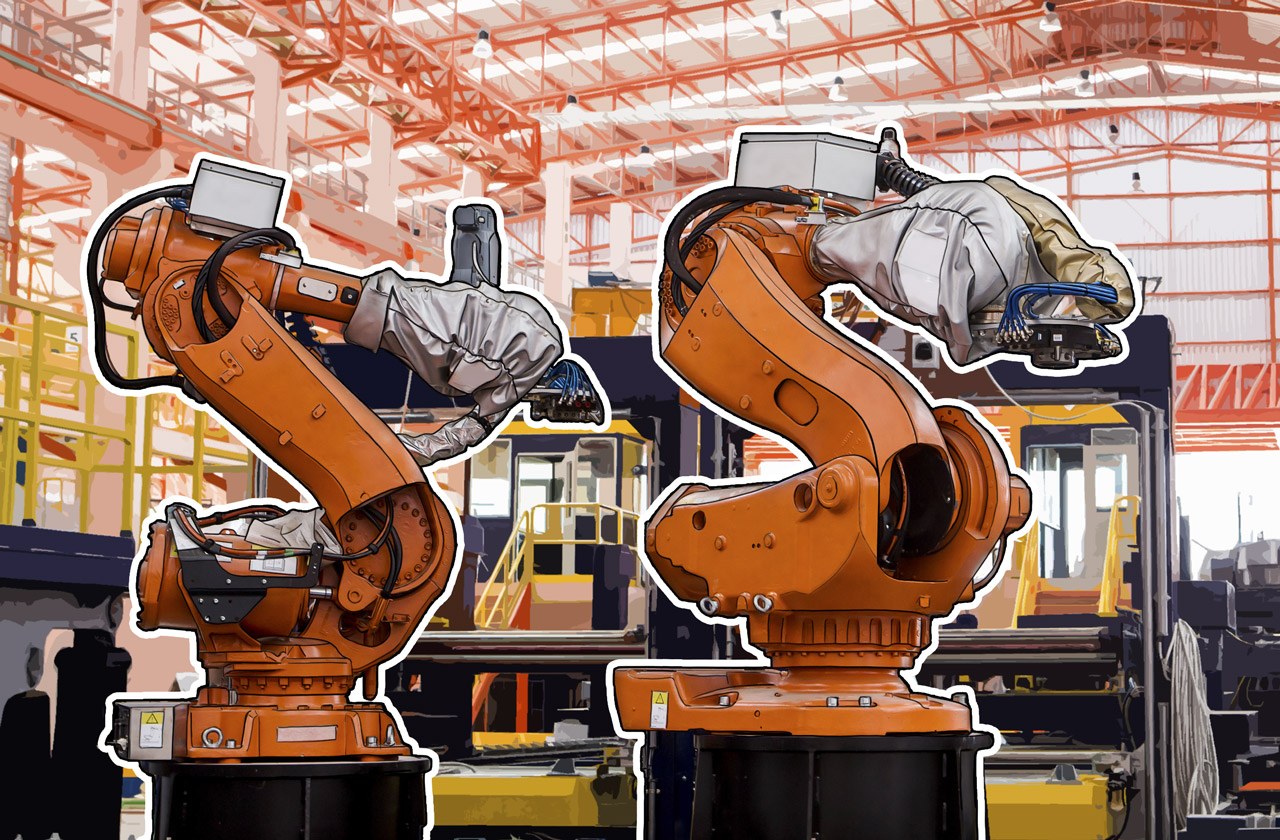
Промышленная робототехника
устройство (машина) с программным или дистанционным (с пульта) управлением, предназначенное для замены человека в производственных процессах. Они быстрее, точнее реализуют однообразные операции, какие человек физически выполнить не может. Применение современных промышленных роботов увеличивает производительность оборудования и выпуск продукции, улучшает качество продукции, помогает экономить материалы и энергию.

Медицинская робототехника
призвана автоматизировать труд врача и здравоохранения в целом. Работа в этой области помогла создать два уникальных направления в медицине. Первое направление - это телехирургия: хирург руководит роботом во время операции, непосредственно не контактируя с пациентом. Второе направление - это хирургия с минимальным вмешательством.
Чему мы сможем научить Вас на курсе



Учебный процесс
Грамотно построенная система обучения
Занятия разделены на модули, каждый из которых заканчивается практикой.

Техническая универсальность
Курс построен на конструкторской платформе Lego Mindstorms и подходит как для версии EV3, так и для версии NXT2.

Все необходимое в одном месте
Схемы сборки, пример программ для роботов, тематический глоссарий и видеоматериалы.

Программы для разных возрастов
Программы обучения для разных возрастных групп.

Дипломный проект
Создание и программирование робота.

FAQ
1. Вводная беседа
Понятие о Робототехнике.
Инструктаж по ТБ.
Информатика, кибернетика, робототехника
Практика: ответы на вопросы учеников.
Инструктаж по ТБ.
Информатика, кибернетика, робототехника
Практика: ответы на вопросы учеников.
2. Основы конструирования
Простейшие механизмы.
Принципы крепления деталей.
Рычаг.
Зубчатая передача: прямая, коническая, червячная.
Передаточное отношение.
Ременная передача, блок. Колесо, ось.
Центр тяжести. Измерения. Решение практических задач.
Названия и принципы крепления деталей.
Строительство высокой башни.
Хватательный механизм.
Виды механической передачи. Зубчатая и ременная передача. Передаточное отношение.
Повышающая передача. Волчок.
Понижающая передача. Силовая «крутилка».
Редуктор. Осевой редуктор с заданным передаточным отношением
Практика: зачет.
Принципы крепления деталей.
Рычаг.
Зубчатая передача: прямая, коническая, червячная.
Передаточное отношение.
Ременная передача, блок. Колесо, ось.
Центр тяжести. Измерения. Решение практических задач.
Названия и принципы крепления деталей.
Строительство высокой башни.
Хватательный механизм.
Виды механической передачи. Зубчатая и ременная передача. Передаточное отношение.
Повышающая передача. Волчок.
Понижающая передача. Силовая «крутилка».
Редуктор. Осевой редуктор с заданным передаточным отношением
Практика: зачет.
3. Моторные механизмы (механизмы с использованием электромотора и батарейного блока. Роботы-автомобили, тягачи, простейшие шагающие роботы)
Стационарные моторные механизмы.
Одномоторный гонщик.
Преодоление горки.
Робот-тягач.
Сумотори.
Шагающие роботы.
Маятник Капицы.
Практика: создание роботов, предусматривающих движение с помощью электродвигателя.
Одномоторный гонщик.
Преодоление горки.
Робот-тягач.
Сумотори.
Шагающие роботы.
Маятник Капицы.
Практика: создание роботов, предусматривающих движение с помощью электродвигателя.
4. Трехмерное моделирование
Введение в виртуальное конструирование.
Зубчатая передача.
Простейшие модели.
Практика: отработка полученных знаний.
Зубчатая передача.
Простейшие модели.
Практика: отработка полученных знаний.
5. Контроллер NXT. Встроенные программы. Датчики. Среда программирования. Стандартные конструкции роботов. Колесные, гусеничные и шагающие роботы. Решение простейших задач. Цикл, Ветвление, параллельные задачи.)
Знакомство с контроллером NXT.
Одномоторная тележка.
Встроенные программы.
Двухмоторная тележка.
Датчики.
Среда программирования Robolab.
Колесные, гусеничные и шагающие роботы.
Решение простейших задач.
Цикл, Ветвление, параллельные задачи.
Кегельринг.
Следование по линии.
Путешествие по комнате.
Практика: создание роботов, управляемых с помощью пульта дистанционного управления и датчика ДУ.
Одномоторная тележка.
Встроенные программы.
Двухмоторная тележка.
Датчики.
Среда программирования Robolab.
Колесные, гусеничные и шагающие роботы.
Решение простейших задач.
Цикл, Ветвление, параллельные задачи.
Кегельринг.
Следование по линии.
Путешествие по комнате.
Практика: создание роботов, управляемых с помощью пульта дистанционного управления и датчика ДУ.
6. Основы управления роботом (Эффективные конструкторские и программные решения классических задач. Эффективные методы программирования: регуляторы, события, параллельные задачи, подпрограммы, контейнеры и пр.)
Релейный регулятор.
Пропорциональный регулятор.
Защита от застреваний.
Траектория с перекрестками.
Пересеченная местность.
Обход лабиринта по правилу правой руки.
Анализ показаний разнородных датчиков.
Синхронное управление двигателями.
Практика: создание робота-барабанщика.
Пропорциональный регулятор.
Защита от застреваний.
Траектория с перекрестками.
Пересеченная местность.
Обход лабиринта по правилу правой руки.
Анализ показаний разнородных датчиков.
Синхронное управление двигателями.
Практика: создание робота-барабанщика.
7. Удаленное управление (Управление роботом через bluetooth)
Передача числовой информации.
Кодирование при передаче.
Устойчивая передача данных.
Практика: управление моторами через bluetooth.
Кодирование при передаче.
Устойчивая передача данных.
Практика: управление моторами через bluetooth.
8. Игры роботов (Боулинг, футбол, баскетбол, командные игры с использованием инфракрасного мяча и других вспомогательных устройств. Использование удаленного управления)
«Царь горы».
Управляемый футбол роботов.
Теннис роботов.
Футбол с инфракрасным мячом (основы).
Практика: проведение состязаний, популяризация новых видов робо-спорта.
Управляемый футбол роботов.
Теннис роботов.
Футбол с инфракрасным мячом (основы).
Практика: проведение состязаний, популяризация новых видов робо-спорта.
9. Состязания роботов
Сумо.
Перетягивание каната.
Кегельринг.
Следование по линии.
Слалом.
Лабиринт.
Интеллектуальное сумо.
Практика: подготовка команд для участия в состязаниях роботов различных уровней, вплоть до всемирных. Регулярные поездки. Использование микроконтроллеров NXT и RCX.
Перетягивание каната.
Кегельринг.
Следование по линии.
Слалом.
Лабиринт.
Интеллектуальное сумо.
Практика: подготовка команд для участия в состязаниях роботов различных уровней, вплоть до всемирных. Регулярные поездки. Использование микроконтроллеров NXT и RCX.
10. Итоговая работа
Разработка творческих проектов на свободную тематику. Одиночные и групповые проекты. Регулярные выставки и поездки.
Преподаватели
Результаты
Старт в будущее
курс научит конструировать и программировать роботов с 8 лет. Специалисты в IT-сфере получают на 30% больше, чем среднестатистические работники, а уровень автоматизации процессов производства составляет около 15%.
Уверенность в своих силах
курс разовьет способность наблюдать и концентрировать внимание на поставленных задачах. В результате вырабатывается усидчивость, вдумчивость, терпение и уверенность в своих силах.
Новые возможности
курс предоставит возможность управлять роботами и машинами, перекладывать на компьютер решение сложных задач, превращать идеи в виртуальную реальность.
Навык презентации проекта
успех проекта на 80% зависит от его презентации. Поэтому, на курсе предусмотрена подготовка к презентации.
Участие во внутренних соревнованиях и олимпиадах по робототехнике
курс предоставляет возможность создать и запрограммировать уникального робота, который может занять самые высокие призовые места.
Профессию будущего
уже к 2025 г. произойдет существенный рывок в сторону автоматизации процессов. Исчезнет порядка 50% существующих на сегодняшний день профессий. Наиболее востребованными будут специалисты в сфере управления технологиями.
Слайдер с фото

Вы научитесь
Программирование.
3D моделирование.
Электроника.
Конструирование.
Гидравлика и пневматика.
Итоги
95% учеников учатся собирать и программировать робота за 6 месяц.
10 модулей для поэтапного создания авторских роботов.
Каждый участник курса создает авторского робота, который украсит каждое портфолио.
Группы до 10 человек гарантируют индивидуальный подход к каждому ученику.
99% родителей отмечают повышение мотивации к обучению у детей.